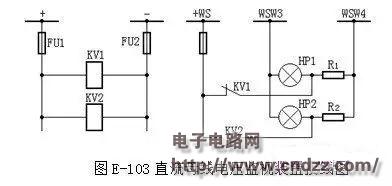
1ã€å›¾E-103为直æµæ¯çº¿ç”µåŽ‹ç›‘视装置电路图,请说明其作用。 Stainless Steel Isolation Pressure Core Stainless Steel Isolation Pressure Core,Motion Sensor System,Water Sensor Switch,Water Sensor Shenzhen Ever-smart Sensor Technology Co., LTD , https://www.fluhandy.com
ç”:直æµæ¯çº¿ç”µåŽ‹ç›‘视装置主è¦æ˜¯åæ˜ ç›´æµç”µæºç”µåŽ‹çš„高低。KV1是低电压监视继电器,æ£å¸¸ç”µåŽ‹KV1励ç£ï¼Œå…¶å¸¸é—触点æ–开,当电压é™ä½Žåˆ°æ•´å®šå€¼æ—¶ï¼Œ KV1失ç£ï¼Œå…¶å¸¸é—触点é—åˆï¼Œ HP1å…‰å—牌亮,å‘出音å“ä¿¡å·ã€‚KV2是过电压继电器,æ£å¸¸ç”µåŽ‹æ—¶KV2失ç£ï¼Œå…¶å¸¸å¼€è§¦ç‚¹åœ¨æ–å¼€ä½ç½®ï¼Œå½“电压过高超过整定值时KV2励ç£ï¼Œå…¶å¸¸å¼€è§¦ç‚¹é—åˆï¼Œ HP2å…‰å—牌亮,å‘出音å“ä¿¡å·ã€‚
2.说明图E-104ç›´æµç»ç¼˜ç›‘视装置接线图å„元件的作用。
ç”:图E-108是常用的ç»ç¼˜ç›‘察装置接线图,æ£å¸¸æ—¶ï¼Œç”µåŽ‹è¡¨1PV开路,而使ST1的触点5-7ã€9-11( ST1çš„1-3ã€2-4æ–å¼€)与ST2的触点9-11接通,投入接地继电器KA。当æ£æžæˆ–è´Ÿæžç»ç¼˜ä¸‹é™åˆ°ä¸€å®šå€¼æ—¶ï¼Œç”µæ¡¥ä¸å¹³è¡¡ä½¿KA动作,ç»KM而å‘出信å·(è‹¥æ£ã€è´Ÿæžå¯¹åœ°çš„ç»ç¼˜ç”µé˜»ç›¸ç‰æ—¶ï¼Œä¸ç®¡ç»ç¼˜ä¸‹é™å¤šå°‘,KAä¸å¯èƒ½åŠ¨ä½œï¼Œå°±ä¸èƒ½å‘出信å·ï¼Œè¿™æ˜¯å…¶ç¼ºç‚¹)。æ¤æ—¶ï¼Œå¯ç”¨2PV进行检查,确定是哪一æžçš„ç»ç¼˜ä¸‹é™(测“+â€å¯¹åœ°æ—¶ï¼ŒST2çš„2-1ã€6-5接通;测“-â€å¯¹åœ°æ—¶ï¼ŒST2çš„1-4ã€5-8接通。æ£å¸¸æ—¶ï¼Œæ¯çº¿ç”µåŽ‹è¡¨è½¬æ¢å¼€å…³ST2çš„2-1ã€5-8ã€9-11接通,电压表2PVå¯æµ‹æ£ã€è´Ÿæ¯çº¿é—´ç”µåŽ‹ï¼ŒæŒ‡ç¤ºä¸º220V。),
è‹¥æ£æžå¯¹åœ°ç»ç¼˜ä¸‹é™ï¼Œåˆ™æŠ•ST1 I档,其触点1-3ã€13-14接通,调节R3至电桥平衡电压表1PV指示为零ä¼;å†å°†ST1投至II档,æ¤æ—¶å…¶è§¦ç‚¹2-4ã€14-15接通,å³å¯ä»Ž1PV上读出直æµç³»ç»Ÿçš„对地总ç»ç¼˜ç”µé˜»å€¼ã€‚若为负æžå¯¹åœ°ç»ç¼˜ä¸‹é™ï¼Œåˆ™å…ˆå°†ST1放在II档,调节3R至电桥平衡,å†å°†ST1投至I档,读出直æµç³»ç»Ÿçš„对地总ç»ç¼˜ç”µé˜»å€¼ã€‚å‡å¦‚æ£æžå‘生接地,则æ£æžå¯¹åœ°ç”µåŽ‹ç‰äºŽé›¶ã€‚而负æžå¯¹åœ°æŒ‡ç¤ºä¸º220V,å之当负æžå‘生接地时,情况与之相å。电压表1PV用作测é‡ç›´æµç³»ç»Ÿçš„总ç»ç¼˜ç”µé˜»ï¼Œç›˜é¢ä¸Šç”»æœ‰ç”µé˜»åˆ»åº¦ã€‚
由于在这ç§ç»ç¼˜ç›‘察装置ä¸æœ‰ä¸€ä¸ªäººå·¥æŽ¥åœ°ç‚¹ï¼Œä¸ºé˜²å…¶å®ƒç»§ç”µå™¨è¯¯åŠ¨ï¼Œè¦æ±‚电æµç»§ç”µå™¨KA有足够大的电阻值,一般选30kΩ,而其å¯åŠ¨ç”µæµä¸º1.4mA,当任一æžç»ç¼˜ç”µé˜»ä¸‹é™åˆ°20 kΩ时,å³èƒ½å‘出信å·ã€‚对地ç»ç¼˜ä¸‹é™å’Œå‘生接地是两ç§æƒ…况。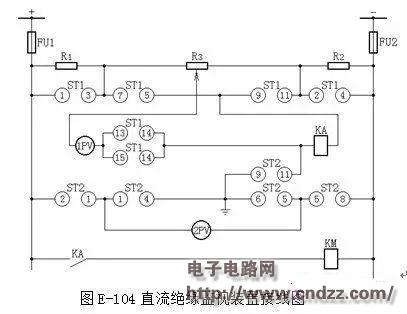
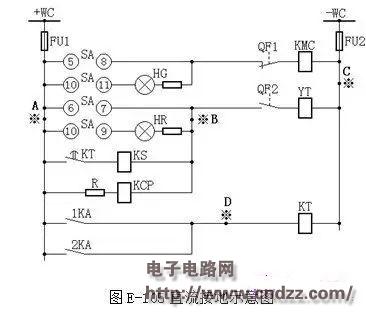
3ã€æ ¹æ®å›¾E-105分别说明A点与C点;B点与C点;A点与B点或A点与D点åŒæ—¶å‘生接地时有什么å±å®³ã€‚
ç”:直æµç³»ç»Ÿåœ¨å˜ç”µç«™ä¸å…·æœ‰é‡è¦çš„ä½ç½®ã€‚è¦ä¿è¯ä¸€ä¸ªå˜ç”µç«™é•¿æœŸå®‰å…¨è¿è¡Œï¼Œå…¶å› ç´ æ˜¯å¤šæ–¹é¢çš„,其ä¸ç›´æµç³»ç»Ÿçš„ç»ç¼˜é—®é¢˜æ˜¯ä¸å®¹å¿½è§†çš„。å˜ç”µç«™çš„ç›´æµç³»ç»Ÿæ¯”较å¤æ‚,通过电缆沟与室外é…电装置的端å排ã€ç«¯åç®±ã€æ“作机构箱ç‰ç›¸è¿žæŽ¥ï¼Œå› ç”µç¼†ç ´æŸã€ç»ç¼˜è€åŒ–ã€å—æ½®ç‰åŽŸå› å‘生接地的å¯èƒ½æ€§è¾ƒå¤šï¼Œå‘生一æžæŽ¥åœ°æ—¶ï¼Œç”±äºŽæ²¡æœ‰çŸè·¯ç”µæµï¼Œç†”æ–器ä¸ä¼šç†”æ–,ä»å¯ç»§ç»è¿è¡Œï¼Œä½†ä¹Ÿå¿…é¡»åŠæ—¶å‘现ã€åŠæ—¶æ¶ˆé™¤ã€‚通常,è¦æ±‚ç›´æµç³»ç»Ÿçš„å„ç§å°æ¯çº¿ã€ç«¯å回路ã€äºŒæ¬¡ç”µç¼†å¯¹åœ°çš„ç»ç¼˜ç”µé˜»å€¼ï¼Œç”¨500V摇表测é‡å…¶å€¼ä¸å¾—å°äºŽ0.5MΩ。直æµå›žè·¯ç»ç¼˜çš„好åå¿…é¡»ç»å¸¸åœ°è¿›è¡Œç›‘视。å¦åˆ™ï¼Œä¼šç»™è¿è¡Œå¸¦æ¥è®¸å¤šä¸å®‰å…¨å› ç´ ã€‚
现以图E-105为例说明直æµæŽ¥åœ°çš„å±å®³ã€‚当图ä¸A点与C点åŒæ—¶æœ‰æŽ¥åœ°å‡ºçŽ°æ—¶ï¼Œç‰äºŽ+WCã€-WC通过大地形æˆçŸè·¯å›žè·¯ï¼Œå¯èƒ½ä¼šä½¿ç†”æ–器FU1å’ŒFU2熔æ–而失去ä¿æŠ¤ç”µæº;当B点与C点åŒæ—¶æœ‰æŽ¥åœ°å‡ºçŽ°æ—¶ï¼Œç‰äºŽå°†è·³é—¸çº¿åœˆçŸè·¯ï¼Œå³ä½¿ä¿æŠ¤æ£å¸¸åŠ¨ä½œï¼ŒYT跳闸线圈çŸè·¯ï¼Œå³ä½¿ä¿æŠ¤æ£å¸¸åŠ¨ä½œï¼ŒYT跳闸线圈也ä¸ä¼šèµ·åŠ¨ï¼Œæ–路器就ä¸ä¼šè·³é—¸ï¼Œå› æ¤åœ¨æœ‰æ•…障的情况下就è¦è¶Šçº§è·³é—¸;当A点与B点或A点与D点,åŒæ—¶æŽ¥åœ°æ—¶ï¼Œå°±ä¼šä½¿ä¿æŠ¤è¯¯åŠ¨ä½œè€Œé€ æˆæ–路器跳闸。直æµæŽ¥åœ°çš„å±å®³ä¸ä»…ä»…æ˜¯ä»¥ä¸Šæ‰€è°ˆçš„å‡ ç‚¹ï¼Œè¿˜æœ‰è®¸å¤šï¼Œåœ¨æ¤ä¸ä¸€ä¸€ä½œä»‹ç»äº†ã€‚
å› ä¸ºå‘生直æµæŽ¥åœ°å°†äº§ç”Ÿè®¸å¤šå®³å¤„,所以对直æµç³»ç»Ÿä¸“门设计一套监视其ç»ç¼˜çŠ¶å†µçš„装置,让它åŠæ—¶åœ°å°†ç›´æµç³»ç»Ÿçš„æ•…éšœæ示给值ç人员,以便迅速检查处ç†ã€‚
4ã€æ®å›¾E-106具有ç¯å…‰ç›‘视的æ–路器控制回路图(电ç£æ“动机构)说明å„元件的å称,动作过程。
ç”:图ä¸ï¼š+WCã€-WC — 控制æ¯çº¿; FU1ã€FU2—熔æ–器,R1-10/6型,250V; SA — 控制开关,LW2-1a.4.6a.40.20.20/F8åž‹;HG — 绿色信å·ç¯å…·ï¼ŒXD2型,附2500Ω电阻;HR — 红色信å·ç¯å…·ï¼ŒXD2型,附2500Ω电阻;
KL — ä¸é—´ç»§ç”µå™¨ï¼ŒDZB-115/220Våž‹;KMC—接触器; KOM — ä¿æŠ¤å‡ºå£ç»§ç”µå™¨;QF—æ–路器辅助开关;WCL—åˆé—¸å°æ¯çº¿;WSA—事故跳闸å°æ¯çº¿; WS—信å·å°æ¯çº¿;YT—æ–路器跳闸线圈;YC—æ–路器åˆé—¸çº¿åœˆï¼ŒFU1ã€FU2—熔æ–器,RM10-60/25 250V;R1â€”é™„åŠ ç”µé˜»ï¼ŒZG11-25型,1Ω;R2â€”é™„åŠ ç”µé˜»ï¼ŒZG11-25型,1000Ω;(+)WTW—闪光å°æ¯çº¿ã€‚
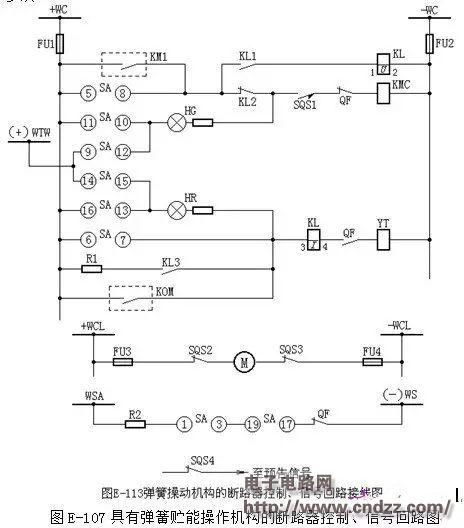
5ã€æ®å›¾E-107具有弹簧贮能æ“作机构的æ–路器控制ã€ä¿¡å·å›žè·¯å›¾è¯´æ˜Žå„元件的å称,动作过程。
ç”:图E-113为SW4-110åž‹æ–路器é…弹簧æ“作机构的æ–路器控制ã€ä¿¡å·å›žè·¯ï¼Œåœ¨å…¶åˆé—¸çº¿åœˆä¸ä¸²æœ‰å¼¹ç°§å·²è´®èƒ½é—é”触点SQS1åªæœ‰å¼¹ç°§è´®èƒ½åŽï¼Œæ‰èƒ½åˆé—¸;当设有自动é‡åˆé—¸ï¼Œå¦‚é‡åˆäºŽæ°¸ä¹…性故障时,弹簧æ¥ä¸åŠè´®èƒ½(需9S),故ä¸èƒ½ç¬¬äºŒæ¬¡é‡åˆã€‚为å¯é èµ·è§ï¼Œä»åŠ 了“防跳â€å›žè·¯ã€‚
当KAC由跳闸ä½ç½®ç»§ç”µå™¨çš„KQTå¯åŠ¨æ—¶ï¼ŒKQT线圈的一端应接至SQS与QF之间。如按以往接线,接于SQS之å‰ï¼Œå½“KAC动作,é‡åˆäºŽæ°¸ä¹…性故障åŽï¼Œæ¤æ—¶å¼¹ç°§è´®èƒ½é‡Šæ”¾ï¼ŒSQS打开,KQT失电,æ–å¼€KACçš„å¯åŠ¨å›žè·¯ï¼Œé‡åˆé—¸ç»§ç”µå™¨ä¸çš„电容åˆé‡æ–°å……电足够时,待弹簧é‡æ–°è´®èƒ½åŽï¼ŒSQSé—åˆï¼ŒKQT线圈带电,KACå¯åŠ¨ï¼Œåˆè¿›è¡Œä¸€æ¬¡é‡åˆé—¸ã€‚æ¤ç§æƒ…况,如ä¸åŠæ—¶æ–开控制开关,还会åå¤è¿›è¡Œå¤šæ¬¡ã€‚
6ã€æ®å›¾E-108具有液压æ“作机构的æ–路器控制ã€ä¿¡å·å›žè·¯å›¾è¯´æ˜Žå„元件的å称,动作过程。
ç”:液压机构的工作压力,å„厂家有一定差异,以北京开关厂出å“CY3型为例,在20℃时,é¢å®šè´®æ°”ç’压力为11.7±0.98MPa,é¢å®šåŽ‹åŠ›17.65MPa,当温度å˜åŒ–1℃时,预充压力å˜åŒ–0.045 MPa。
图E-114ä¸ï¼Œå½“液压低于14.72 MPa,åˆé—¸å›žè·¯ä¸çš„压力触点SP4æ–开,ä¸å…许åˆé—¸;当液压低于13.73 MPa,跳闸回路ä¸çš„压力触点SP5æ–开,ä¸å…许跳闸,如电网è¿è¡Œå…许,也å¯ç”¨è¿™ä¸ªè§¦ç‚¹å¯åŠ¨ä¸é—´ç»§ç”µå™¨åŽï¼Œä½œç”¨äºŽè·³é—¸ã€‚
当压力低于15.72 MPa,3SP3触点é—åˆï¼Œå‘出油压é™ä½Žä¿¡å·;当液压低于16.72 MPa时,触点SP1ã€SP2é—åˆï¼Œå¯åŠ¨æ²¹æ³µæ‰“压,当油压上å‡åˆ°18.63 MPa时,SP1ã€SP2å‡æ–开,油泵åœæ¢æ‰“压。当压力低于9.8MPa或高于24.5,MPa时,由压力表的触点PP1ã€PP2å¯åŠ¨KM3å‘出压力异常信å·ï¼Œè¿˜å¯ä»¥åˆ©ç”¨KM3常é—触点é—é”油泵电动机å¯åŠ¨æŽ¥è§¦å™¨çš„å¯åŠ¨å›žè·¯(图ä¸æœªç¤ºå‡º),防æ¢å½“油压é™åˆ°é›¶æ—¶ï¼Œå¯åŠ¨æ²¹æ³µå¯èƒ½é€ æˆæ–路器的慢分事故。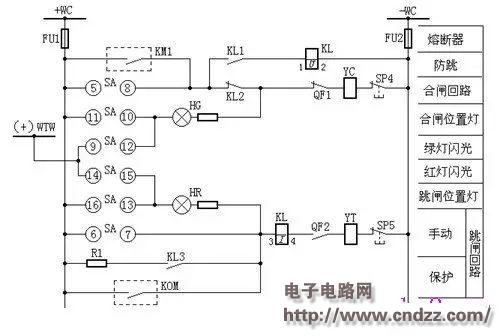

7ã€æ ¹æ®å›¾E-109由两个ä¸é—´ç»§ç”µå™¨æž„æˆçš„闪光装置接线图,说明动作过程。
本文引用地å€ï¼šhttp://
ç”:由两个ä¸é—´ç»§ç”µå™¨æž„æˆçš„闪光装置的原ç†æŽ¥çº¿è§å›¾E-109图所示。当æŸä¸€æ–路器的ä½ç½®ä¸Žå…¶æŽ§åˆ¶å¼€å…³ä¸å¯¹åº”时,闪光æ¯çº¿(+)WTWç»â€œä¸å¯¹åº”â€å›žè·¯ï¼Œä¿¡å·ç¯(HR或HG)åŠæ“作线圈(YT或YC)与负电æºæŽ¥é€šï¼ŒKM1å¯åŠ¨ï¼ŒKM1常开触点é—åˆï¼ŒKM2相继å¯åŠ¨ï¼Œå…¶å¸¸å¼€è§¦ç‚¹å°†KM1线圈çŸæŽ¥ï¼Œå¹¶ä½¿é—ªå…‰æ¯çº¿ç›´æŽ¥ä¸Žæ£å¸¸ç”µæºæ²Ÿé€šï¼Œä¿¡å·ç¯(HR或HG)全亮;当KM1触点延时æ–å¼€åŽï¼ŒKM2失ç£ï¼Œå…¶å¸¸å¼€è§¦ç‚¹æ–开,常é—触点é—åˆï¼ŒKM1å†æ¬¡å¯åŠ¨ï¼Œé—ªå…‰æ¯çº¿(+)WTWç»KM1线圈与æ£ç”µæºæŽ¥é€šï¼Œâ€œä¸å¯¹åº”â€å›žè·¯ä¸çš„ä¿¡å·ç¯å‘ˆåŠäº®ï¼Œé‡å¤ä¸Šè¿°è¿‡ç¨‹ï¼Œä¾¿å‘出连ç»çš„闪光信å·ã€‚KM1åŠKM2带延时å¤ä½ï¼Œæ˜¯ä¸ºäº†ä½¿é—ªå…‰å˜å¾—æ›´åŠ æ˜Žæ˜¾ã€‚
图ä¸ï¼Œè¯•éªŒæŒ‰é’®SEçš„ä¿¡å·ç¯HW用于模拟试验。当æ¿ä¸‹SE时,闪光æ¯çº¿(+)WTWç»ä¿¡å·ç¯HW与负电æºæŽ¥é€šï¼ŒäºŽæ˜¯é—ªå…‰è£…置便按上述顺åºåŠ¨ä½œï¼Œä½¿è¯•éªŒç¯HWå‘出闪光信å·ã€‚HWç»æŒ‰é’®çš„常é—触点接在æ£ã€è´Ÿç”µæºä¹‹é—´ï¼Œå› 而兼作闪光装置熔æ–器的监视ç¯ã€‚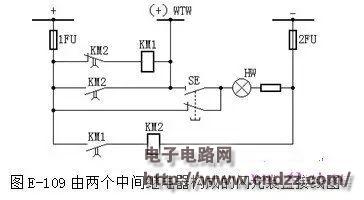
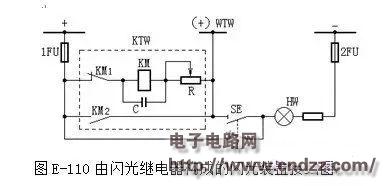
8ã€æ ¹æ®å›¾E-110说明闪光装置接线的构æˆåŠåŠ¨ä½œè¿‡ç¨‹ã€‚
ç”:图E-110ä¸ï¼Œç”±KMã€Rã€C组æˆé—ªå…‰ç»§ç”µå™¨ã€‚按下按钮SE时,它相当于一个ä¸å¯¹åº”回路,闪光æ¯çº¿ä¸Žè´Ÿç”µæºæŽ¥é€šï¼Œé—ªå…‰ç»§ç”µå™¨KTW的线圈回路接通 ,电容器Cç»é™„åŠ ç”µé˜»R和“ä¸å¯¹åº”â€å›žè·¯ä¸çš„ä¿¡å·ç¯å……ç”µï¼ŒäºŽæ˜¯åŠ åœ¨KM两端的电压ä¸æ–å‡é«˜ï¼Œå½“达到其动作电压时,KM动作,其常开触点KM.2é—åˆï¼Œé—ªå…‰æ¯çº¿(+)WTW与æ£ç”µæºç›´æŽ¥æŽ¥é€šï¼Œä¿¡å·ç¯å…¨äº®ã€‚åŒæ—¶å…¶å¸¸é—触点KM.1æ–开它的线圈回路,电容C 便放电,放电åŽï¼Œç”µå®¹C 的端电压é€æ¸é™ä½Žï¼Œå¾…é™è‡³KM的返回电压时,KMå¤å½’,KM.2æ–开,KM.1é—åˆï¼Œé—ªå…‰æ¯çº¿ç»KMã€KM.1与æ£ç”µæºæŽ¥é€šï¼Œä¿¡å·ç¯å‘ˆåŠäº®ã€‚é‡å¤ä¸Šè¿°è¿‡ç¨‹ï¼Œä¾¿å‘出连ç»é—ªå…‰ã€‚
9ã€æ ¹æ®å›¾E-111说明å„符å·å…ƒä»¶çš„å称åŠåŠ¨ä½œè¿‡ç¨‹ã€‚
ç”:常用ä¸å¤®å¤å½’能é‡å¤åŠ¨ä½œçš„事故信å·è£…置。所谓 ä¸å¤®å¤å½’能é‡å¤åŠ¨ä½œçš„事故信å·ï¼Œæ˜¯æŒ‡æ–路器自动跳闸åŽï¼Œä¸ºä½¿å€¼ç人员ä¸å—音å“ä¿¡å·é•¿æœŸå¹²æ‰°è€Œå½±å“事故处ç†ï¼Œå¯ä»¥ä¿ç•™ç»¿ç¯é—ªå…‰ä¿¡å·è€Œä»…将音å“ä¿¡å·ç«‹å³è§£é™¤ã€‚
图E-111ä¸KSP1为ZC—23型冲击继电器,脉冲å˜æµå™¨T一次侧并è”的二æžç®¡V和电容器C起抗干扰作用;二次侧并è”的二æžç®¡V的作用是将T的一次侧电æµçªç„¶å‡å°è€Œåœ¨äºŒæ¬¡ä¾§æ„Ÿåº”的电æµæ—路,使干簧继电器KRä¸è¯¯åŠ¨(å› å¹²ç°§ç»§ç”µå™¨åŠ¨ä½œæ²¡æœ‰æ–¹å‘性)。其原ç†æ˜¯å½“æ–路器事故分闸或按下试验按钮SE1时,脉冲å˜æµå™¨T一次绕组ä¸æœ‰ç”µæµå¢žé‡ï¼ŒäºŒæ¬¡ç»•ç»„ä¸æ„Ÿåº”电æµèµ·åŠ¨KR,KR动作åŽèµ·åŠ¨ä¸é—´ç»§ç”µå™¨KM。KM有两对触点,一对触点é—åˆèµ·åŠ¨èœ‚鸣器HB,å‘出音å“ä¿¡å·;å¦ä¸€å¯¹è§¦ç‚¹é—åˆèµ·åŠ¨æ—¶é—´ç»§ç”µå™¨KT1,ç»ä¸€å®šå»¶æ—¶åŽï¼ŒKT1起动KM1,KM1动作åŽï¼Œä½¿KM失ç£è¿”回,于是音å“åœæ¢ï¼Œæ•´ä¸ªäº‹æ•…ä¿¡å·å›žè·¯æ¢å¤åˆ°åŽŸå§‹çŠ¶æ€ã€‚
准备第二å°æ–路器跳闸时å‘出音å“,ä¸å¯¹åº”å¯åŠ¨å›žè·¯å¦‚图E-112。图E-111ä¸å¸¸å¼€è§¦ç‚¹KM2是由预告信å·è£…置引æ¥çš„(è§å›¾E-113),所以自动解除音å“用的时间继电器KT1å’Œä¸é—´ç»§ç”µå™¨KM1为两套音å“ä¿¡å·è£…置所共用。
为能试验事故音å“装置的完好与å¦ï¼Œå¦è®¾æœ‰è¯•éªŒæŒ‰é’®SE1,按SE1时,å³å¯å¯åŠ¨KSP1,使装置å‘出音å“并按上述程åºå¤å½’至原始状æ€ã€‚
按下手动å¤å½’按钮也å¯ä½¿éŸ³å“ä¿¡å·è§£é™¤ã€‚
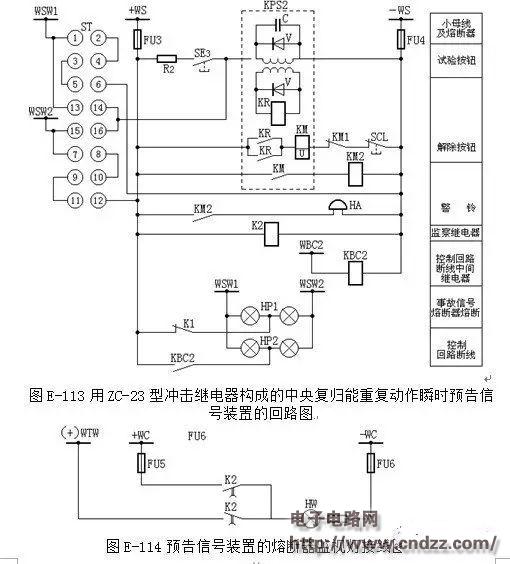
10ã€æ ¹æ®å›¾E-113说明å„符å·å…ƒä»¶çš„å称åŠåŠ¨ä½œè¿‡ç¨‹ã€‚
ç”:预告信å·è£…置是当设备å‘生故障或æŸäº›ä¸æ£å¸¸è¿è¡Œæƒ…况时能自动å‘出音å“和光å—牌ç¯å…‰ä¿¡å·çš„装置。它å¯å¸®åŠ©è¿è¡Œäººå‘˜åŠæ—¶åœ°å‘现故障åŠéšæ‚£ï¼Œä»¥ä¾¿é‡‡å–é€‚å½“æŽªæ–½åŠ ä»¥å¤„ç†ï¼Œé˜²æ¢äº‹æ•…扩大。å˜ç”µæ‰€å¸¸è§çš„预告信å·æœ‰ï¼šå˜åŽ‹å™¨è½»ç“¦æ–¯åŠ¨ä½œã€å˜åŽ‹å™¨è¿‡è´Ÿè·ã€å˜åŽ‹å™¨æ²¹æ¸©è¿‡é«˜ã€ç”µåŽ‹äº’感器二次回路æ–线ã€ç›´æµå›žè·¯ç»ç¼˜é™ä½Žã€æŽ§åˆ¶å›žè·¯æ–线ã€äº‹æ•…音å“ä¿¡å·å›žè·¯ç†”æ–器熔æ–ã€ç›´æµç”µåŽ‹è¿‡é«˜æˆ–过低ç‰ã€‚
预告信å·ä¸€èˆ¬å‘自å„ç§ç›‘测è¿è¡Œå‚æ•°çš„å•ç‹¬ç»§ç”µå™¨ï¼Œä¾‹å¦‚过负è·ä¿¡å·ç”±è¿‡è´Ÿè·ä¿æŠ¤ç»§ç”µå™¨å‘出。
预告信å·åˆ†çž¬æ—¶é¢„å‘Šä¿¡å·å’Œå»¶æ—¶ä¿¡å·ä¸¤ç§ï¼Œå¯¹æŸäº›å½“电力系统ä¸å‘生çŸè·¯æ•…éšœå¯èƒ½ä¼´éšå‘出的预告信å·ï¼Œä¾‹å¦‚:过负è·ã€ç”µåŽ‹äº’感器二次回路æ–线ç‰ï¼Œéƒ½åº”带延时å‘出,其延时应大于外部çŸè·¯çš„最大切除时é™ã€‚è¿™æ ·ï¼Œåœ¨å¤–éƒ¨çŸè·¯åˆ‡é™¤åŽï¼Œè¿™äº›ç”±ç³»ç»ŸçŸè·¯æ‰€å¼•èµ·çš„异常就会自动消失,而ä¸è®©å®ƒå‘出è¦æŠ¥ä¿¡å·ï¼Œä»¥å…分散è¿è¡Œäººå‘˜çš„注æ„力。
ç›®å‰ï¼Œå¹¿æ³›é‡‡ç”¨çš„ä¸å¤®å¤å½’带é‡å¤åŠ¨ä½œçš„预告信å·è£…置,其动作原ç†ä¸Žäº‹æ•…音å“ä¿¡å·è£…置相åŒï¼Œæ‰€ä¸åŒçš„是åªæ˜¯ç”¨å…‰å—牌ç¯æ³¡ä»£æ›¿äº†äº‹æ•…音å“ä¿¡å·è£…ç½®ä¸å¯¹åº”å¯åŠ¨å›žè·¯ä¸çš„电阻R,并用è¦é“ƒä»£æ›¿äº†èœ‚鸣器,图E-118所示为由ZC-23型冲击继电器构æˆçš„ä¸å¤®å¤å½’能é‡å¤åŠ¨ä½œçž¬æ—¶é¢„å‘Šä¿¡æ¯è£…置接线图,其动作原ç†ä¸Žå›¾E-111相似,图ä¸KM1由图E-117引æ¥ï¼Œç”¨ä»¥è‡ªåŠ¨è§£é™¤éŸ³å“,WSW1å’ŒWSW2为瞬时预告å°æ¯çº¿ã€‚
当设备å‘生ä¸æ£å¸¸æƒ…况时,例如控制回路æ–线,则KBC2动作,其常开触点é—åˆï¼Œé€šè¿‡å›žè·¯+WS KBC2常开触点 HP2 WSW1å’ŒWSW2
ST13-14 ST15-16 KSP2 -WS,使KSP2动作,触点KM2é—åˆï¼Œä½¿è¦é“ƒHAå‘出音å“ä¿¡å·ï¼ŒåŒæ—¶å…‰å—牌HP2示出“控制回路æ–线â€ä¿¡å·ï¼ŒæŒ‰ä¸‹è§£é™¤æŒ‰é’®SCL,音å“å³å¯è§£é™¤(也å¯ç»ä¸€å®šå»¶æ—¶ï¼Œè‡ªåŠ¨è§£é™¤),而光å—牌信å·ç›´åˆ°æ•…障消除,KBC2触点返回æ‰ä¼šæ¶ˆå¤±ã€‚由于采用了ZC-23åž‹ç»§ç”µå™¨ï¼Œå› è€Œä¿¡å·æ˜¯å¯ä»¥é‡å¤åŠ¨ä½œçš„。为能ç»å¸¸æ£€æŸ¥å…‰å—牌ç¯æ³¡çš„完好性,设有转æ¢å¼€å…³ST。处于“åˆâ€ä½æ—¶ï¼ŒST触点1-2ã€3-4ã€5-6ã€7-8ã€9-10ã€11-12全接通,分别将信å·ç”µæº+WSå’Œ-WS接至å°æ¯çº¿WSW2å’ŒWSW1,使光å—牌所有的ç¯æ³¡äº®ã€‚å‘预告信å·æ—¶ï¼Œä¸¤åªç¯æ³¡æ˜¯å¹¶è”的,ç¯æ³¡æ˜Žäº®ï¼Œå½“å…¶ä¸ä¸€åªç¯æ³¡æŸå时,ä»èƒ½ä¿è¯å‘出信å·ã€‚而试验光å—牌时,两åªç¯æ³¡åˆ™æ˜¯ä¸²è”çš„ï¼Œå› è€Œç¯å…‰è¾ƒæš—,æ¤æ—¶è‹¥ä¸€åªç¯æ³¡æŸå则该光å—牌å³ä¸äº®ã€‚
预告信å·è£…置由å•ç‹¬çš„熔æ–器FU3ã€FU4供电,若FU3或FU4熔æ–则ä¸èƒ½å‘出预告信å·ï¼Œæ‰€ä»¥å¯¹ç†”æ–器电æºé‡‡ç”¨äº†ç¯å…‰ç›‘视的方法。图E-119为预告信å·è£…置的熔æ–器监视ç¯æŽ¥çº¿å›¾ã€‚æ£å¸¸è¿è¡Œæ—¶ï¼Œç†”æ–器监视继电器K2带电,其常开触点é—åˆï¼Œä¸å¤®ä¿¡å·å±ä¸Šçš„白色指示ç¯HW亮;当FU3熔æ–时,K2失电,其常é—触点é—åˆï¼ŒHW被接至闪光å°æ¯çº¿(+)WTW上å‘出闪光。
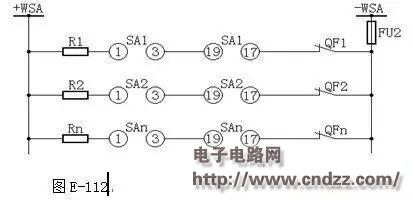
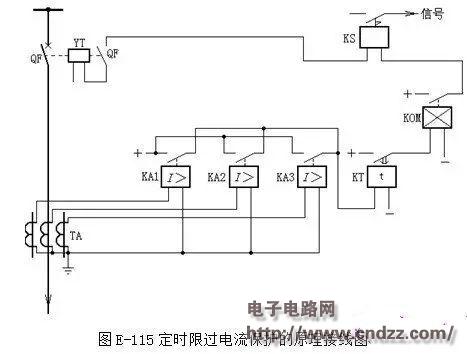
11ã€æ ¹æ®å›¾E-115说明线路定时é™è¿‡ç”µæµä¿æŠ¤çš„æž„æˆåŠåŠ¨ä½œè¿‡ç¨‹ã€‚
ç”:如图E-115,当被ä¿æŠ¤çº¿è·¯å‘生故障时,çŸè·¯ç”µæµç»ç”µæµäº’感器TAæµå…¥KA1—KA3,çŸè·¯ç”µæµå¤§äºŽç”µæµç»§ç”µå™¨æ•´å®šå€¼æ—¶ï¼Œç”µæµç»§ç”µå™¨å¯åŠ¨ã€‚å› ä¸‰åªç”µæµç»§ç”µå™¨è§¦ç‚¹å¹¶è”,所以åªè¦ä¸€åªç”µæµç»§ç”µå™¨è§¦ç‚¹é—åˆï¼Œä¾¿å¯åŠ¨æ—¶é—´ç»§ç”µå™¨KT,按预先整定的时é™ï¼Œå…¶è§¦ç‚¹é—åˆï¼Œå¹¶å¯åŠ¨å‡ºå£ä¸é—´ç»§ç”µå™¨KOM。KOM动作åŽï¼ŒæŽ¥é€šè·³é—¸å›žè·¯ï¼Œä½¿QFæ–路器跳闸,åŒæ—¶ä½¿ä¿¡å·ç»§ç”µå™¨åŠ¨ä½œå‘出动作信å·ã€‚由于ä¿æŠ¤çš„动作时é™ä¸ŽçŸè·¯ç”µæµçš„大å°æ— 关,是固定的,固称为定时é™è¿‡ç”µæµã€‚
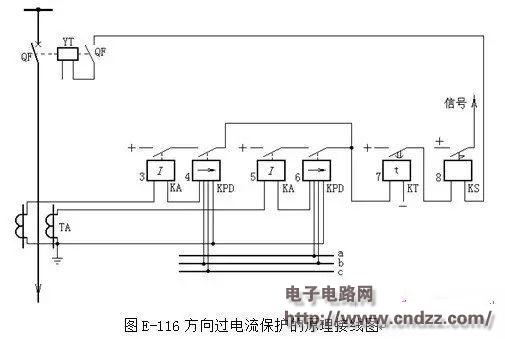
12ã€æ ¹æ®å›¾E-116说明线路方å‘过电æµä¿æŠ¤çš„æž„æˆåŠåŠ¨ä½œè¿‡ç¨‹ã€‚
ç”:方å‘过æµçš„ä¿æŠ¤åŽŸç†æŽ¥çº¿å¦‚图E-116所示,电æµç»§ç”µå™¨3ã€5是å¯åŠ¨å…ƒä»¶ï¼ŒåŠŸçŽ‡æ–¹å‘继电器4ã€6是方å‘元件,采用90°接线(UbcIAåŠUabIc)。å„相电æµç»§ç”µå™¨çš„触点和对应功率方å‘继电器触点串è”,以达到按相å¯åŠ¨çš„作用。时间继电器7是使ä¿æŠ¤è£…置获得必è¦çš„动作时é™ï¼Œå…¶è§¦ç‚¹é—åˆï¼Œç»ä¿¡å·ç»§ç”µå™¨8å‘出跳闸脉冲,使æ–路器QF跳闸。
æ–¹å‘过电æµä¿æŠ¤ï¼Œç”±äºŽåŠ 装了功率方å‘ç»§ç”µå™¨ï¼Œå› æ¤çº¿è·¯å‘生çŸè·¯æ—¶ï¼Œè™½ç„¶ç”µæµç»§ç”µå™¨éƒ½å¯èƒ½åŠ¨ä½œï¼Œä½†åªæœ‰æµå…¥åŠŸçŽ‡æ–¹å‘继电器的电æµä¸ŽåŠŸçŽ‡æ–¹å‘继电器规定的方å‘一致时(当规定指å‘线路时,å³ä¸€æ¬¡ç”µæµä»Žæ¯çº¿æµå‘线路时),功率方å‘继电器æ‰åŠ¨ä½œï¼Œä»Žè€Œä½¿æ–路器跳闸。而当æµå…¥åŠŸçŽ‡æ–¹å‘继电器的电æµä¸ŽåŠŸçŽ‡æ–¹å‘继电器规定的方å‘相åæ—¶(å³ä¸€æ¬¡ç”µæµä»Žçº¿è·¯æµå‘æ¯çº¿æ—¶),功率方å‘继电器ä¸åŠ¨ä½œï¼Œå°†æ–¹å‘过电æµä¿æŠ¤é—é”,ä¿è¯äº†æ–¹å‘过电æµä¿æŠ¤çš„选择性。
在æ£å¸¸è¿è¡Œæ—¶ï¼Œè´Ÿè·ç”µæµçš„æ–¹å‘也å¯èƒ½ç¬¦åˆåŠŸçŽ‡æ–¹å‘继电器的动作方å‘,其触点é—åˆï¼Œä½†æ¤æ—¶ç”µæµç»§ç”µå™¨æœªåŠ¨ä½œï¼Œæ‰€ä»¥æ•´å¥—æ–¹å‘过电æµä¿æŠ¤ä»è¢«é—é”ä¸åŠ¨ä½œã€‚
æ–¹å‘过电æµä¿æŠ¤çš„动作时é™ï¼Œæ˜¯å°†åŠ¨ä½œæ–¹å‘一致的ä¿æŠ¤ï¼ŒæŒ‰é€†å‘阶梯原则进行整定的。
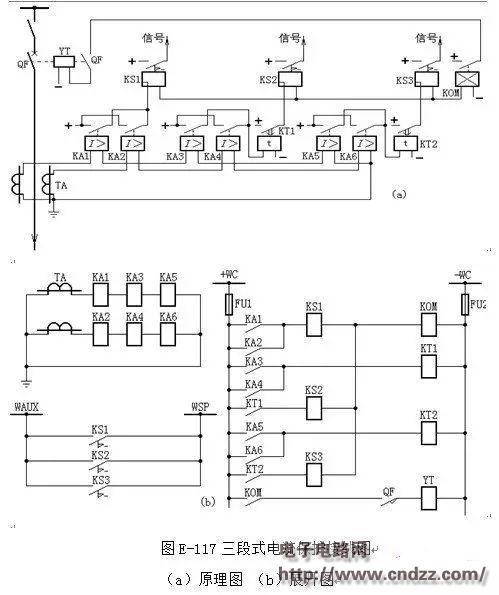
13ã€æ ¹æ®å›¾E-117说明输电线路三段å¼ç”µæµä¿æŠ¤çš„æž„æˆåŠåŠ¨ä½œè¿‡ç¨‹ã€‚
ç”:线路三段å¼ç”µæµä¿æŠ¤çš„原ç†æŽ¥çº¿å›¾åŠå±•å¼€å›¾å¦‚图E-117所示。其ä¸KA1ã€KA2ã€KS1æž„æˆç¬¬â… 段瞬时电æµé€Ÿæ–;KA3ã€KA4ã€KT1ã€KS2æž„æˆç¬¬â…¡æ®µé™æ—¶ç”µæµé€Ÿæ–;KA5ã€KA6ã€KT2ã€KS3æž„æˆç¬¬â…¢æ®µå®šæ—¶é™è¿‡ç”µæµã€‚三段ä¿æŠ¤å‡ä½œç”¨äºŽä¸€ä¸ªå…¬å…±çš„出å£ä¸é—´ç»§ç”µå™¨KOM,任何一段ä¿æŠ¤åŠ¨ä½œå‡å¯åŠ¨KOM,使æ–路器跳闸,åŒæ—¶ç›¸åº”段的信å·ç»§ç”µå™¨åŠ¨ä½œæŽ‰ç‰Œï¼Œå€¼ç人员便å¯ä»Žå…¶æŽ‰ç‰ŒæŒ‡ç¤ºåˆ¤æ–是哪套ä¿æŠ¤åŠ¨ä½œï¼Œè¿›è€Œå¯¹æ•…障的大概范围作出判æ–。
14ã€æ ¹æ®å›¾E-118说明线路三段å¼é›¶åºç”µæµä¿æŠ¤çš„æž„æˆåŠåŠ¨ä½œè¿‡ç¨‹ã€‚
ç”:三段å¼é›¶åºç”µæµä¿æŠ¤çš„原ç†æŽ¥çº¿å¦‚图E-118,在被ä¿æŠ¤çº¿è·¯çš„三相上分别装设型å·å’Œå˜æ¯”完全相åŒçš„电æµäº’感器,将它们的二次绕组互相并è”,然åŽæŽ¥è‡³ç”µæµç»§ç”µå™¨çš„线圈。当æ£å¸¸è¿è¡Œå’Œå‘生相间故障时,电网ä¸æ²¡æœ‰é›¶åºç”µæµï¼Œæ•…IR=0,继电器ä¸åŠ¨ä½œï¼Œåªæœ‰å‘生接地故障时,æ‰å‡ºçŽ°é›¶åºç”µæµï¼Œå¦‚其值超过整定值,继电器就动作。
实际工作ä¸ï¼Œç”±äºŽä¸‰åªç”µæµäº’感器的励ç£ç‰¹æ€§ä¸ä¸€è‡´ï¼Œå½“å‘ç”Ÿç›¸é—´æ•…éšœæ—¶ï¼Œä¼šé€ æˆè¾ƒå¤§çš„ä¸å¹³è¡¡ç”µæµã€‚为了使ä¿æŠ¤è£…置在这ç§æƒ…况下ä¸è¯¯åŠ¨ä½œï¼Œé€šå¸¸å°†ä¿æŠ¤çš„动作电æµæŒ‰èº²è¿‡æœ€å¤§ä¸å¹³è¡¡ç”µæµæ¥æ•´å®šã€‚
与相间çŸè·¯çš„电æµä¿æŠ¤ç›¸åŒï¼Œé›¶åºç”µæµä¿æŠ¤ä¹Ÿé‡‡ç”¨é˜¶æ®µå¼ä¿æŠ¤ï¼Œé€šå¸¸é‡‡ç”¨ä¸‰æ®µå¼ã€‚ç›®å‰çš„“四统一â€ä¿æŠ¤å±åˆ™é‡‡ç”¨å››æ®µå¼ã€‚图E-118为三段å¼é›¶åºç”µæµä¿æŠ¤çš„原ç†æŽ¥çº¿å›¾ã€‚瞬时零åºç”µæµé€Ÿæ–(零åºâ… 段有,由KA1ã€KMå’ŒKS7æž„æˆ),一般å–ä¿æŠ¤çº¿è·¯æœ«ç«¯æŽ¥åœ°çŸè·¯æ—¶ï¼Œæµè¿‡ä¿æŠ¤è£…ç½®3å€æœ€å¤§é›¶åºç”µæµ3Iomçš„1.3å€ï¼Œä¿æŠ¤èŒƒå›´ä¸å°äºŽçº¿è·¯å…¨é•¿çš„15%~25%。
零åºâ…¡æ®µ(ç”±KA3ã€KT4å’ŒKS8æž„æˆ)的整定电æµï¼Œä¸€èˆ¬å–下一级线路的零åºâ… 段整定电æµçš„1.2å€ï¼Œæ—¶é™0.5s,ä¿è¯åœ¨æœ¬çº¿æœ«ç«¯å•ç›¸æŽ¥åœ°æ—¶ï¼Œå¯é 动作。
零åºâ…¢æ®µ(ç”±KA5ã€KT6å’ŒKS9æž„æˆ)的整定电æµå¯å–零åºâ…¡(或Ⅲ)段整定的1.2å€ï¼Œæˆ–大于三相çŸè·¯çš„最大ä¸å¹³è¡¡ç”µæµï¼Œå…¶çµæ•æ€§è¦æ±‚下一级末端故障时,能å¯é 动作。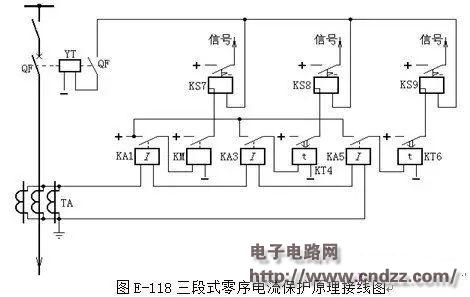
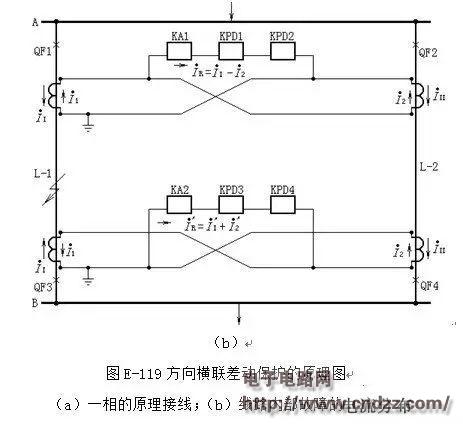
15ã€æ ¹æ®å›¾E-119说明åŒå›žçº¿çš„横è”差动ä¿æŠ¤çš„æž„æˆåŠåŠ¨ä½œè¿‡ç¨‹ã€‚
本文引用地å€ï¼šhttp://
ç”:åŒå›žçº¿æ¨ªè”差动ä¿æŠ¤è£…置是由电æµå¯åŠ¨å…ƒä»¶å’ŒåŠŸçŽ‡æ–¹å‘元件组æˆï¼Œå›¾E-119(a)ä¸ï¼ŒåŠŸçŽ‡æ–¹å‘继电器KPD1å’ŒKPD2的电æµçº¿åœˆä¸Žç”µæµç»§ç”µå™¨KA串è”接于åŒå›žçº¿çš„电æµå·®ä¸Šã€‚功率方å‘继电器KPD1与KPD2åŠ è¿›åŒä¸€ç”µåŽ‹(接æ¯çº¿ç”µåŽ‹äº’感器),但æžæ€§ç›¸å。在I1> I2(å³åŒä¸€å›žçº¿ä¸Šå‘生故障)时,左边的方å‘继电器KPD1的转矩为æ£ï¼Œè€Œå³è¾¹çš„æ–¹å‘继电器KPD2的转矩为负;å之,在I2> I1 (å³å¦ä¸€å›žçº¿ä¸Šå‘生故障)时,KPD2的转矩为æ£ï¼ŒKPD1çš„è½¬çŸ©ä¸ºè´Ÿã€‚è¿™æ ·ä¸¤å›žçº¿è·¯ä¸ä»»ä¸€å›žçº¿è·¯ä¸Šå‘生故障时,电æµç»§ç”µå™¨KAå‡å¯åŠ¨ä¿æŠ¤è£…置,而两个功率方å‘继电器则用æ¥åˆ¤åˆ«æ•…障线路。
æ£å¸¸åŠå¤–部故障时,ⅰ1=â…°2ã€â…°R =0 ã€ä¿æŠ¤ä¸åŠ¨ä½œã€‚
在线路L-1上K点故障时,ⅰ1>â…°2 ,所以ⅰR =â…°1-â…°2>â…°s,电æµç»§ç”µå™¨KA1å¯åŠ¨ï¼ŒåŠŸçŽ‡æ–¹å‘继电器KPD1触点é—åˆï¼ŒKPD2触点ä¸é—åˆï¼Œä¿æŠ¤åŠ¨ä½œè·³å¼€æ–路器QF1。在线路å—端,æµå…¥ç»§ç”µå™¨çš„电æµâ…°R =â…°1+â…°2 [è§å›¾E-119(b)],使电æµç»§ç”µå™¨KA2ã€åŠŸçŽ‡æ–¹å‘继电器KPD3动作,而KPD4ä¸åŠ¨ä½œï¼Œä»Žè€Œä½¿æ–路器QF3跳闸。åŒç†åœ¨çº¿è·¯L-2上çŸè·¯æ—¶ï¼Œé€ç«¯KA1ã€KPD2动作,å—端KA2ã€KPD4动作,åŒæ—¶è·³å¼€æ–路器QF2ã€QF4。
为防æ¢å•å›žçº¿è¿è¡Œæ—¶ï¼Œæ¨ªè”差动ä¿æŠ¤åœ¨å¤–部故障时误动作,ä¿æŠ¤çš„ç›´æµç”µæºç»åŒå›žçº¿ä¸¤ä¸ªå¼€å…³çš„常开辅助触点串è”é—é”,åªæœ‰å½“两个开关åŒæ—¶æŽ¥å…¥æ—¶ï¼Œä¿æŠ¤æ‰ä½œç”¨ã€‚
æ–¹å‘横è”差动ä¿æŠ¤çš„动作电æµåº”大于穿越性故障时在差电æµå›žè·¯ä¸å¼•èµ·çš„最大ä¸å¹³è¡¡ç”µæµã€‚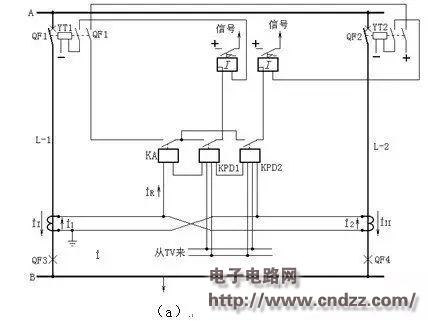
16ã€æ ¹æ®å›¾E-120说明åŒå›žçº¿ç”µæµå¹³è¡¡ä¿æŠ¤çš„æž„æˆåŠå·¥ä½œæƒ…况。
ç”:电æµå¹³è¡¡ä¿æŠ¤æ˜¯æ¨ªè”差动ä¿æŠ¤çš„å¦ä¸€ç§å½¢å¼ï¼Œå®ƒæ˜¯æŒ‰æ¯”较åŒå›žçº¿è·¯ä¸ç”µæµçš„ç»å¯¹å€¼è€Œå·¥ä½œçš„,如图E-120所示。电æµå¹³è¡¡ç»§ç”µå™¨KBL1ã€KBL2å„有一个工作线圈åŒNw,一个制动线圈åŒNB和一个电压线圈åŒNv。KBL1的工作线圈接于线路L-1电æµäº’感器的二次侧,由电æµI1产生动作力矩Mw1,其制动线圈接于线路L-2电æµäº’感器的二次侧,由电æµI1产生动作力矩MB1。KBL2的工作线圈接于线路L-2电æµäº’感器的二次侧,由I2产生动作力矩Mw2,其制动线圈接于线路L-1电æµäº’感器的二次侧,由I1产生动作力矩MB2。KBL1ã€KBL2的电压线圈å‡æŽ¥äºŽæ¯çº¿ç”µåŽ‹äº’感器的二次侧。继电器的动作æ¡ä»¶æ˜¯Mw>MB+Mv(Mv为电压线圈ä¸äº§ç”Ÿçš„力矩)。
æ£å¸¸è¿è¡ŒåŠå¤–部çŸè·¯æ—¶ï¼Œç”±äºŽII=I2,KBL1ã€KBL2由于其å作用力矩Mv和继电器内弹簧å作用力矩Ms的作用,使触点ä¿æŒåœ¨æ–å¼€ä½ç½®ï¼Œä¿æŠ¤ä¸ä¼šåŠ¨ä½œã€‚
当一回线路å‘生故障(如线路L-1çš„K点),由于II>I2,并由于电压大大é™ä½Žï¼Œç”µåŽ‹çº¿åœˆçš„å作用力矩显著å‡å°‘ï¼Œå› æ¤KBL1ä¸ç”±II产生的动作力矩Mw1大于I2产生的制动力矩MB1与电压产生的制动力矩Mv之和,所以KBL1动作,切除故障线路L-1;对于KBL2,由于æµè¿‡å…¶åˆ¶åŠ¨çº¿åœˆçš„电æµII大于工作线圈æµè¿‡ç”µæµI2,å³åˆ¶åŠ¨åŠ›çŸ©å¤§äºŽåŠ¨ä½œåŠ›çŸ©ï¼Œæ‰€ä»¥å®ƒä¸ä¼šåŠ¨ä½œã€‚
必须指出,å•ç«¯ç”µæºçš„åŒå›žçº¿è·¯ä¸Šï¼Œå¹³è¡¡ä¿æŠ¤åªèƒ½è£…于é€ç”µä¾§ï¼Œå—电侧ä¸èƒ½è£…è®¾ã€‚å› ä¸ºä»»ä¸€å›žçº¿è·¯çŸè·¯ï¼Œæµè¿‡å—电侧两个平衡继电器的工作线圈和制动线圈的电æµå¤§å°æ˜¯ç›¸ç‰çš„,ä¿æŠ¤å°†ä¸èµ·ä½œç”¨ã€‚
由于åŒå›žå¹³è¡Œçº¿æ¨ªè”差动ä¿æŠ¤åŠå¹³è¡¡ä¿æŠ¤ï¼Œåœ¨é 近对侧出å£çŸè·¯æ—¶ï¼Œæœ¬ä¾§ä¸¤æ¡çº¿è·¯æµè¿‡çš„电æµï¼Œå…¶ç”µæµçš„横差值,ä¸è¶³ä»¥å¯åŠ¨ä¿æŠ¤ï¼Œåªæœ‰ç‰å¾…对侧的ä¿æŠ¤åŠ¨ä½œï¼Œåˆ‡é™¤æ•…éšœåŽï¼Œæœ¬ä¾§çš„éžæ•…障线电æµé™ä¸ºé›¶ï¼Œæ‰ç”±æ•…障线电æµå¯åŠ¨æœ¬ä¾§ä¿æŠ¤ï¼Œåˆ‡é™¤æ•…障线路。这ç§æƒ…况被称为相继动作。线路上相继动作区域大å°ä¸Žä¿æŠ¤æ•´å®šå€¼åŠçŸè·¯ç”µæµæœ‰å…³ã€‚
横è”差动ä¿æŠ¤ï¼Œå…¶æ–¹å‘继电器接有æ¯çº¿ç”µåŽ‹ï¼Œåœ¨å¹³è¡Œçº¿è·¯å‡ºå£ä¸‰ç›¸çŸè·¯æ—¶ï¼Œç”µåŽ‹ä¸ºé›¶ï¼Œå¦‚æ–¹å‘继电器的电压回路没有良好的记忆作用,便会误动,称为电压æ»åŒºã€‚
(一)“跳闸åŽâ€ä½ç½®
当SA的手柄在“跳闸åŽâ€ä½ç½®ï¼Œæ–路器在跳闸ä½ç½®æ—¶ï¼Œå…¶å¸¸é—触点é—åˆï¼Œ+WCç»FU1 SA11-10 HGåŠé™„åŠ ç”µé˜» QF(常é—) KMC线圈 FU2 -WC。æ¤æ—¶ï¼Œç»¿è‰²ä¿¡å·ç¯å›žè·¯æŽ¥é€šï¼Œç»¿ç¯äº®ï¼Œå®ƒè¡¨ç¤ºæ–路器æ£å¤„于跳闸åŽä½ç½®ï¼ŒåŒæ—¶è¡¨ç¤ºç”µæºã€ç†”æ–器ã€è¾…助触点åŠåˆé—¸å›žè·¯å®Œå¥½ï¼Œå¯ä»¥è¿›è¡Œåˆé—¸æ“作。但KMCä¸ä¼šåŠ¨ä½œï¼Œå› 电压主è¦é™åœ¨HGåŠé™„åŠ ç”µé˜»ä¸Šã€‚
(二)“预备åˆé—¸â€ä½ç½®
当SA的手柄顺时针方å‘旋转90o至“预备åˆé—¸â€ä½ç½®ï¼ŒSA9-10接通,绿ç¯HG回路由(+)WTW SA9-10 HG QF(常é—) KMC
FU2 -WC导通,绿ç¯é—ªå…‰ï¼Œå‘出预备åˆé—¸ä¿¡å·ï¼Œä½†KMCä»ä¸ä¼šå¯åŠ¨ï¼Œå› 回路ä¸ä¸²æœ‰HGå’ŒR。
(三)“åˆé—¸â€ä½ç½®
当SA的手柄å†é¡ºæ—¶é’ˆæ–¹å‘旋转45o至“åˆé—¸â€ä½ç½®æ—¶ï¼ŒSA5-8触点接通,接触器KMC回路由+WC SA5-8 KL2(常é—) QF(常é—)
KMC线圈 -WC导通而å¯åŠ¨ï¼Œé—åˆå…¶åœ¨åˆé—¸çº¿åœˆå›žè·¯ä¸çš„触点,使æ–路器åˆé—¸ã€‚æ–路器åˆé—¸åŽï¼ŒQF常é—触点打开ã€å¸¸å¼€è§¦ç‚¹é—åˆã€‚
(å››)“åˆé—¸åŽâ€ä½ç½®
æ¾æ‰‹åŽï¼ŒSA的手柄自动å时针方å‘转动45o,å¤å½’至垂直(å³â€œåˆé—¸åŽâ€)ä½ç½®ï¼ŒSA16-13触点接通。æ¤æ—¶ï¼Œçº¢ç¯HR回路由 FU1
SA16-13 HR KL线圈 QF(常开) YT线圈 FU2-WC
导通,红ç¯äº®ï¼ŒæŒ‡ç¤ºæ–路器处于åˆé—¸ä½ç½®ï¼ŒåŒæ—¶è¡¨ç¤ºè·³é—¸å›žè·¯å®Œå¥½ï¼Œå¯ä»¥è¿›è¡Œè·³é—¸ã€‚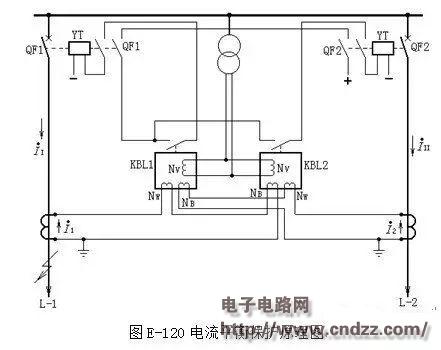
September 11, 2022